Devansh Agrawal
I am a Senior Flight Software Engineer at Rotor Technologies, Inc. Rotor is building the next generation of civilian helicopters and the avionics that will fly them. Rotor's helicopters will save lives, reduce costs, and spur innovation.
I did my PhD in Aerospace Engineering at the University of Michigan, advised by Professor Dimitra Panagou. I also received my Masters of Engineering in Robotics during this time. My research interests include the synthesis and analysis of safety critical control and perception systems for nonlinear robotic systems. My research lies at the intersection of theory and practice, where I develop novel theoretical results to characterize the performance and behavior of control algorithms, and then demonstrate and validate them experimentally using quadrotors and ground rovers. Most of my code is open-sourced.
I did my undergrad from Imperial College London, where I earned my BEng and MEng in Aeronautical Engineering. I was awared the Royal Aeronautical Society Prize, and was on the Dean's List all four years. My masters thesis (pdf) was on the control of extremely flexible structures. During my undergrad I co-founded the Imperial Drone Society, and the Rocketry Team.
I also spent a year at Massachussets Institute of Technology, as an exchange student during my third year. During this time I worked on my projects, including the design of a super-short takeoff and landing vehicle, the optimization of silent-properless aircrafts, and was actively involved in the MIT Rocket Team.
Visit my tech-notes for some technical notes that I have written up. If you find them useful (or find mistakes), please let me know!
I am always interested in technically challenging projects, and love to discuss ideas with people. Feel free to reach out if you would like to chat.
Email / GitHub / Google Scholar / LinkedIn
Thesis
1. Architectures for Safe Autonomy: Provable Guarantees Across Control, Planning, and Perception.
Devansh Agrawal
University of Michigan, Ann Arbor
2025
pdf /
video /
slides /
abstract
/
This thesis focuses on the design of safety-critical autonomous systems - systems that must always satisfy a set of safety constraints. The primary objective is to develop a cohesive architecture for the entire autonomy stack, ensuring that, under specific and verifiable assumptions, a robot can execute its mission while maintaining safety. Modern autonomous systems present unique challenges because their autonomy stacks are composed of interdependent modules: (1) a mission-level planning module that makes high-level decisions, (2) a perception module that processes sensor data to estimate the robot’s state and the operating environment, (3) a planning module that generates a trajectory for execution, and (4) a control module that computes actuation commands. Guaranteeing safety requires a systematic approach to the design and integration of these modules. To achieve this, we take a bottom-up approach, starting with the design of a safety-critical controller and identifying the assumptions necessary for its safe operation. These assumptions impose requirements on upstream autonomy modules, such as the planning and perception modules. We then propose methods to design or augment each module to ensure that, when composed, the entire autonomy stack maintains safety guarantees. The focus is not only on individual module correctness but making assumptions for each module that can be satisfied by upstream modules, to be able to achieve system-level guarantees. The main contributions of this thesis include: (A) the gatekeeper architecture - a flexible framework for establishing rigorous safety guarantees at the planning level, (B) the development of certifiably correct perception algorithms that generate accurate obstacle maps while providing error bounds to account for odometry drift, and (C) the introduction of clarity and perceivability - concepts that quantify a robotic system’s ability to gather information about its environment, considering the environment model as well as the robot’s actuation and sensing capabilities. Each contribution is supported by formal proofs and validated through simulations and hardware experiments with aerial and mobile robots.
Publications
(Yellow indicates my favorite/representative publications)
1. Multi-Agent gatekeeper: Safe Flight Planning and Formation Control for Urban Air Mobility
Thomas Marshall Vielmetti, Devansh Agrawal, and Dimitra Panagou
AIAA SciTech 2026
2026
arxiv /
pdf /
abstract
/
We present Multi-Agent gatekeeper, a framework that provides provable safety guarantees for leader-follower formation control in cluttered 3D environments. Existing methods face a trad-off: online planners and controllers lack formal safety guarantees, while offline planners lack adaptability to changes in the number of agents or desired formation. To address this gap, we propose a hybrid architecture where a single leader tracks a pre-computed, safe trajectory, which serves as a shared trajectory backup set for all follower agents. Followers execute a nominal formation-keeping tracking controller, and are guaranteed to remain safe by always possessing a known-safe backup maneuver along the leader's path. We formally prove this method ensures collision avoidance with both static obstacles and other agents. The primary contributions are: (1) the multi-agent gatekeeper algorithm, which extends our single-agent gatekeeper framework to multi-agent systems; (2) the trajectory backup set for provably safe inter-agent coordination for leader-follower formation control; and (3) the first application of the gatekeeper framework in a 3D environment. We demonstrate our approach in a simulated 3D urban environment, where it achieved a 100% collision-avoidance success rate across 100 randomized trials, significantly outperforming baseline CBF and NMPC methods. Finally, we demonstrate the physical feasibility of the resulting trajectories on a team of quadcopters.
2. Reformulations of Quadratic Programs for Lipschitz Continuity
Devansh Agrawal, Haejoon Lee, and Dimitra Panagou
IEEE L-CSS, 2025
2025
arxiv /
pdf /
code /
link /
abstract
/
Optimization-based controllers often lack regularity guarantees, such as Lipschitz continuity, when multiple constraints are present. When used to control a dynamical system, these conditions are essential to ensure the existence and uniqueness of the system’s trajectory. Here we propose a general method to convert a Quadratic Program (QP) into a Second-Order Cone Problem (SOCP), which is shown to be Lipschitz continuous. Key features of our approach are that (i) the regularity of the resulting formulation does not depend on the structural properties of the constraints, such as the linear independence of their gradients; and (ii) it admits a closed-form solution under some assumptions, which is not available for general QPs with multiple constraints, enabling faster computation. We support our method with rigorous analysis and examples.

3. Adaptive ergodic search with energy-aware scheduling for persistent multi-robot missions
Kaleb Ben Naveed, Devansh Agrawal, Rahul Kumar, and Dimitra Panagou
Autonomous Robots, Springer Nature
2025
arxiv /
pdf /
video /
code /
link /
abstract
/
Autonomous robots are increasingly deployed for long-term information-gathering tasks, which pose two key challenges: planning informative trajectories in environments that evolve across space and time, and ensuring persistent operation under energy constraints. This paper presents a unified framework, mEclares, that addresses both challenges through adaptive ergodic search and energy-aware scheduling in multi-robot systems. Our contributions are two-fold: (1) we model real-world variability using stochastic spatiotemporal environments, where the underlying information evolves continuously over space and time under process noise. To guide exploration, we construct a target information spatial distribution (TISD) based on clarity, a metric that captures the decay of information in the absence of observations and highlights regions of high uncertainty; and (2) we introduce Robust-meSch ( RmeSch ), an online scheduling method that enables persistent operation by coordinating rechargeable robots sharing a single mobile charging station. Unlike prior work, our approach avoids reliance on preplanned schedules, static or dedicated charging stations, and simplified robot dynamics. Instead, the scheduler supports general nonlinear models, accounts for uncertainty in the estimated position of the charging station, and handles central node failures. The proposed framework is validated through real-world hardware experiments, and feasibility guarantees are provided under specific assumptions.

4. Fusion of Indirect Methods and Iterative Learning for Persistent Velocity Trajectory Optimization of a Sustainably Powered Autonomous Surface Vessel
Kavin Govindarajan, Devansh Agrawal, Dimitra Panagou, and Chris Vermillion
IEEE CCTA 2025
2025
arxiv /
pdf /
link /
abstract
/
In this paper, we present the methodology and results for a real-time velocity trajectory optimization for a solar-powered autonomous surface vessel (ASV), where we combine indirect optimal control techniques with iterative learning. The ASV exhibits cyclic operation due to the nature of the solar profile, but weather patterns create inevitable disturbances in this profile. The nature of the problem results in a formulation where the satisfaction of pointwise-in-time state of charge constraints does not generally guarantee persistent feasibility, and the goal is to maximize information gathered over a very long (ultimately persistent) time duration. To address these challenges, we first use barrier functions to tighten pointwise-in-time state of charge constraints by the minimal amount necessary to achieve persistent feasibility. We then use indirect methods to derive a simple switching control law, where the optimal velocity is shown to be an undetermined constant value during each constraint-inactive time segment. To identify this optimal constant velocity (which can vary from one segment to the next), we employ an iterative learning approach. The result is a simple closed-form control law that does not require a solar forecast. We present simulation-based validation results, based on a model of the SeaTrac SP-48 ASV and solar data from the North Carolina coast. These simulation results show that the proposed methodology, which amounts to a closed-form controller and simple iterative learning update law, performs nearly as well as a model predictive control approach that requires an accurate future solar forecast and significantly greater computational capability.
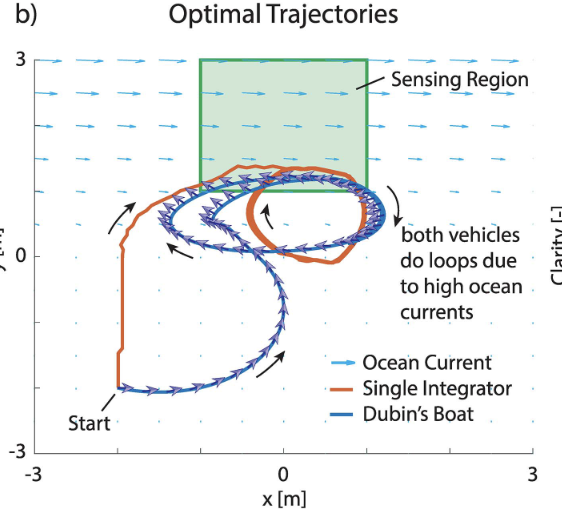
5. Online Safety under Multiple Constraints and Input Bounds using gatekeeper: Theory and Applications
Devansh Agrawal and Dimitra Panagou
IEEE L-CSS 2025
2025
arxiv /
pdf /
code /
abstract
/
This letter presents an approach to guarantee online safety of a cyber-physical system under multiple state and input constraints. Our proposed framework, called gatekeeper, recursively guarantees the existence of an infinite-horizon trajectory that satisfies all constraints and system dynamics. Such trajectory is constructed using a backup controller, which we define formally in this paper. gatekeeper relies on a small number of verifiable assumptions, and is computationally efficient since it requires optimization over a single scalar variable. We make two primary contributions in this letter. (A) First, we develop the theory of gatekeeper: we derive a sub-optimality bound relative to a full nonlinear trajectory optimization problem, and show how this can be used in runtime to validate performance. This also informs the design of the backup controllers and sets. (B) Second, we demonstrate in detail an application of gatekeeper for multi-agent formation flight, where each Dubins agent must avoid multiple obstacles and weapons engagement zones, both of which are nonlinear, nonconvex constraints.
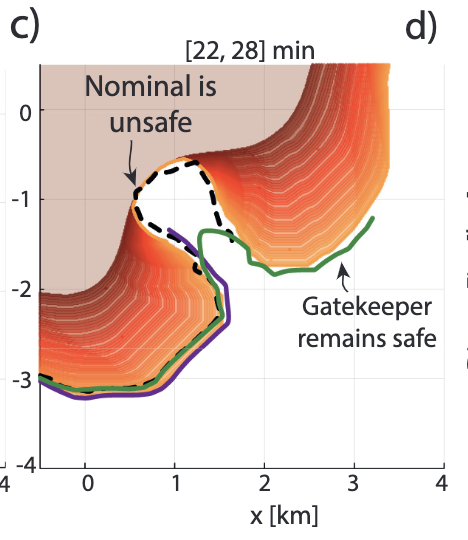
6. Certifiably-Correct Mapping for Safe Navigation Despite Odometry Drift
Devansh Agrawal, Taekyung Kim, Rajiv Govindjee, Trushant Adeshara, Jiangbo Yu, Anurekha Ravikumar, and Dimitra Panagou
RSS 2025
2025
pdf /
video /
code /
abstract
/
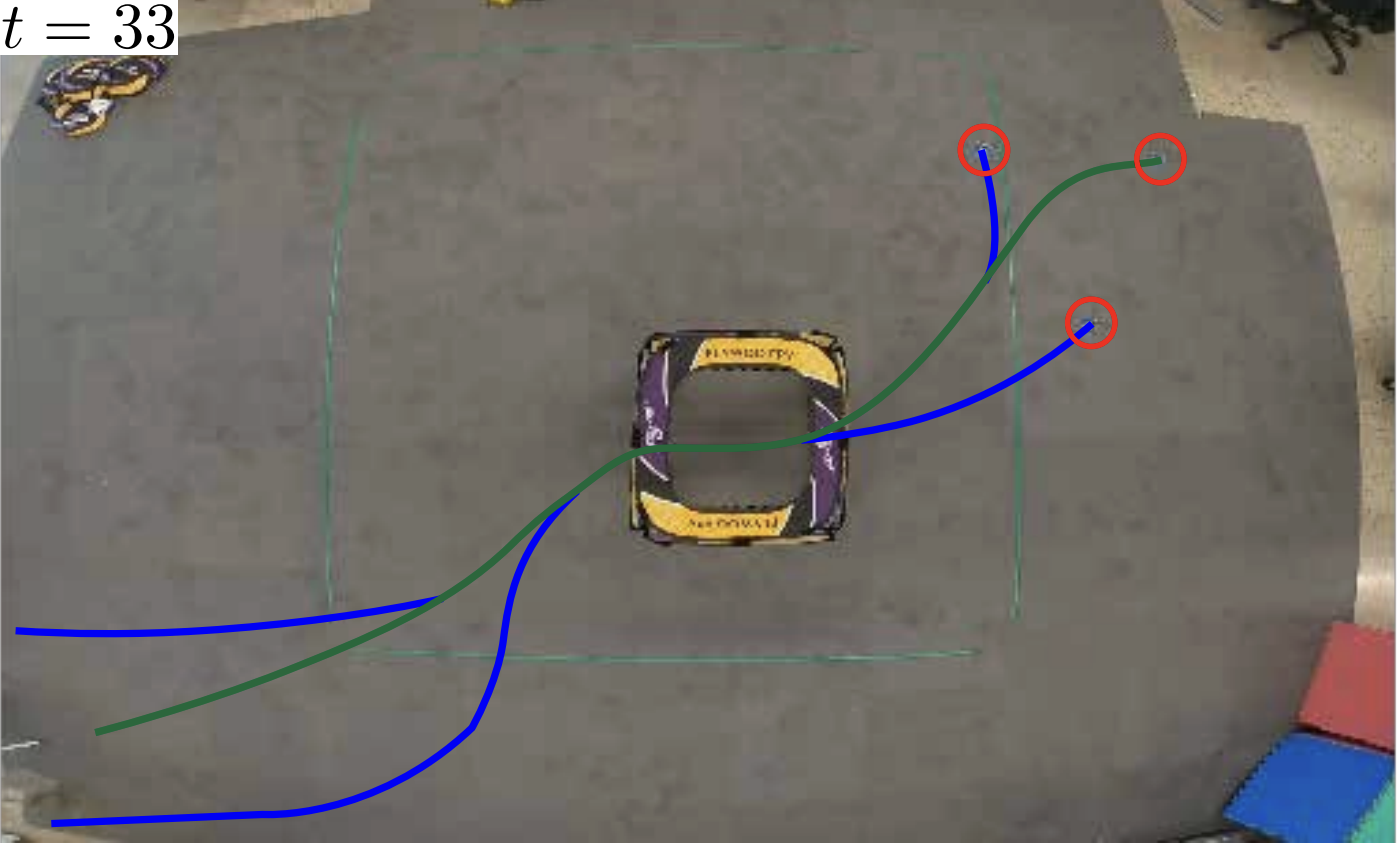
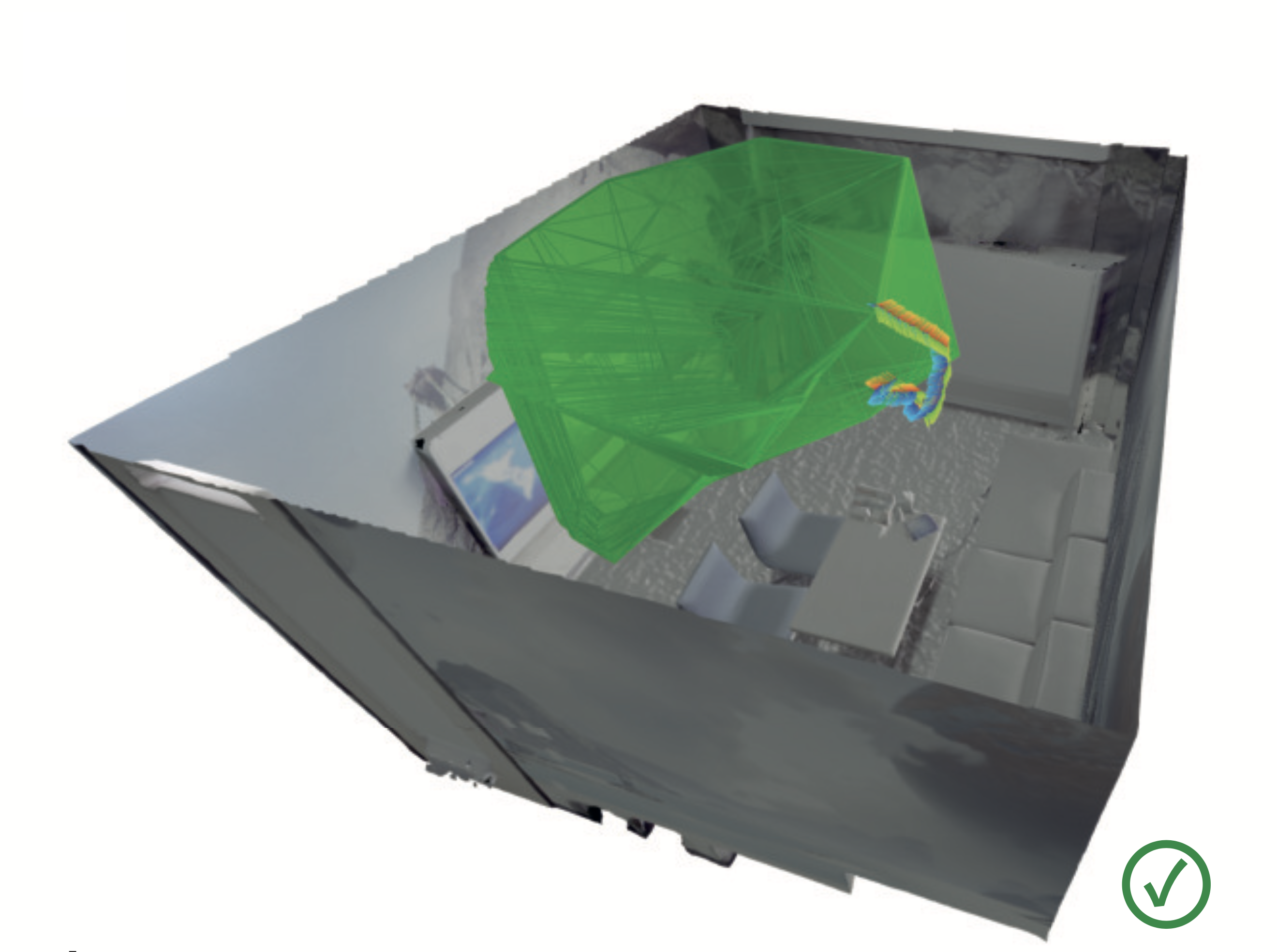
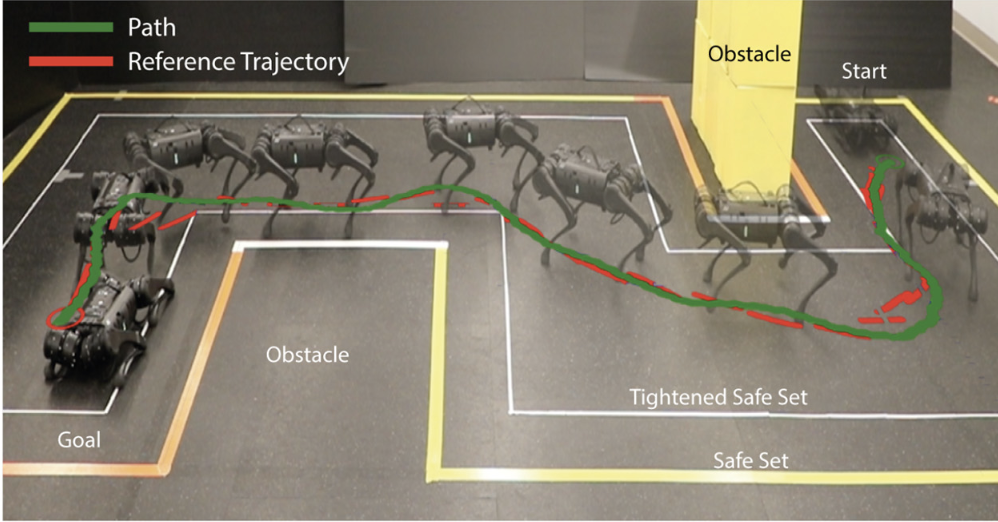
Accurate perception, state estimation and mapping are essential for safe robotic navigation as planners and controllers rely on these components for safety critical decisions. However, existing mapping approaches often assume perfect pose estimates, an unrealistic assumption that can lead to incorrect obstacle maps and therefore collisions. This paper introduces a framework for certifiably-correct mapping that ensures that the obstacle map correctly classifies obstacle-free regions despite the odometry drift in vision-based localization systems (VIO/SLAM). By deflating the safe region based on the incremental odometry error at each timestep, we ensure that the map remains accurate and reliable locally around the robot, even as the overall odometry error with respect to the inertial frame grows unbounded. Our contributions include two approaches to modify popular obstacle mapping paradigms, (I) Safe Flight Corridors, and (II) Signed Distance Fields. We formally prove the correctness of both methods, and describe how they integrate with existing planning and control modules. Simulations using the Replica dataset highlight the efficacy of our methods compared to state-of-the-art techniques. Real-world experiments with a robotic rover show that, while baseline methods result in collisions with previously mapped obstacles, the proposed framework enables the rover to safely stop before potential collisions.
7. Multi-Agent Clarity-Aware Dynamic Coverage with Gaussian Processes
Devansh Agrawal and Dimitra Panagou
IEEE CDC 2024
2024
arxiv /
pdf /
code /
abstract
/
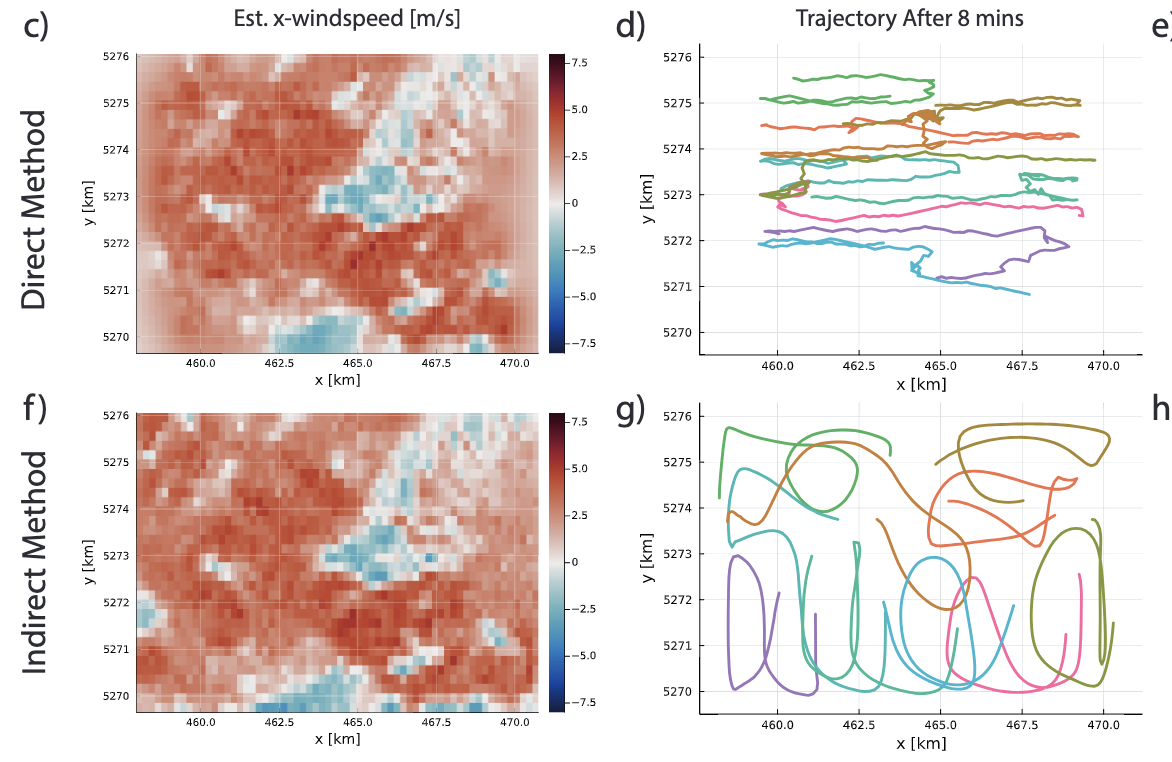
This paper presents two algorithms for multi-agent dynamic coverage in spatiotemporal environments, where the coverage algorithms are informed by the method of data assimilation. In particular, we show that by explicitly modeling the environment using a Gaussian Process (GP) model, and considering the sensing capabilities and the dynamics of a team of robots, we can design an estimation algorithm and multi-agent coverage controller that explores and estimates the state of the spatiotemporal environment. The uncertainty of the estimate is quantified using clarity, an information-theoretic metric, where higher clarity corresponds to lower uncertainty. By exploiting the relationship between GPs and Stochastic Differential Equations (SDEs) we quantify the increase in clarity of the estimated state at any position due to a measurement taken from any other position. We use this relationship to design two new coverage controllers, both of which scale well with the number of agents exploring the domain, assuming the robots can share the map of the clarity over the spatial domain via communication. We demonstrate the algorithms through a realistic simulation of a team of robots collecting wind data over a region in Austria.
8. gatekeeper: Online Safety Verification and Control for Nonlinear Systems in Dynamic Environments
⭐️ Best Paper Award (Finalist), IEEE TC-RC (Technical Committee on Robot Control) 2024 ⭐️
Devansh Agrawal, Ruichang Chen, and Dimitra Panagou
IEEE T-RO 2024
2024
arxiv /
pdf /
video /
code /
link /
bib
/
abstract
/
@ARTICLE{10665919,
author={Agrawal, Devansh Ramgopal and Chen, Ruichang and Panagou, Dimitra},
journal={IEEE Transactions on Robotics},
title={gatekeeper: Online Safety Verification and Control for Nonlinear Systems in Dynamic Environments},
year={2024},
volume={},
number={},
pages={1-17},
keywords={Trajectory;Safety;Robots;Logic gates;Robot sensing systems;Nonlinear dynamical systems;Quadrotors;Collision Avoidance;Motion and Path Planning;Aerial Systems: Applications;Safety-Critical Control},
doi={10.1109/TRO.2024.3454415}
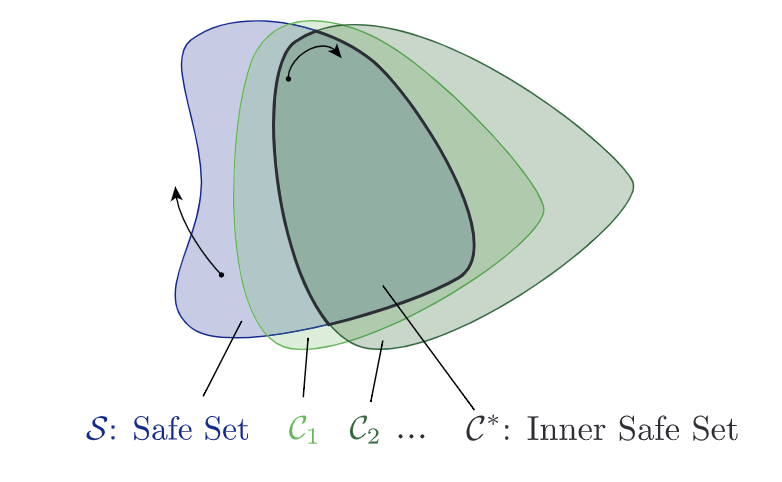
}This paper presents the gatekeeper algorithm, a real-time and computationally-lightweight method that ensures that trajectories of a nonlinear system satisfy safety constraints despite sensing limitations. gatekeeper integrates with existing path planners and feedback controllers by introducing an additional verification step to ensure that proposed trajectories can be executed safely, despite nonlinear dynamics subject to bounded disturbances, input constraints and partial knowledge of the environment. Our key contribution is that (A) we propose an algorithm to recursively construct safe trajectories by numerically forward propagating the system over a (short) finite horizon, and (B) we prove that tracking such a trajectory ensures the system remains safe for all future time, i.e., beyond the finite horizon. We demonstrate the method in a simulation of a dynamic firefighting mission, and in physical experiments of a quadrotor navigating in an obstacle environment that is sensed online. We also provide comparisons against the state-of-the-art techniques for similar problems.

9. Eclares: Energy-Aware Clarity-Driven Ergodic Search
Kaleb Ben Naveed, Devansh Agrawal, Christopher Vermillion, Dimitra Panagou
IEEE ICRA 2024
2024
arxiv /
pdf /
video /
code /
link /
bib
/
abstract
/
@inproceedings{naveed2024eclares,
title={Eclares: Energy-aware clarity-driven ergodic search},
author={Naveed, Kaleb Ben and Agrawal, Devansh and Vermillion, Christopher and Panagou, Dimitra},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
pages={14326--14332},
year={2024},
organization={IEEE}
}Planning informative trajectories while considering the spatial distribution of the information over the environment, as well as constraints such as the robot’s limited battery capacity, makes the long-time horizon persistent coverage problem complex. Ergodic search methods consider the spatial distribution of environmental information while optimizing robot trajectories; however, current methods lack the ability to construct the target information spatial distribution for environments that vary stochastically across space and time. Moreover, current coverage methods dealing with battery capacity constraints either assume simple robot and battery models or are computationally expensive. To address these problems, we propose a framework called Eclares, in which our contribution is two-fold. 1) First, we propose a method to construct the target information spatial distribution for ergodic trajectory optimization using clarity, an information measure bounded between [0, 1]. The clarity dynamics allow us to capture information decay due to a lack of measurements and to quantify the maximum attainable information in stochastic spatiotemporal environments. 2) Second, instead of directly tracking the ergodic trajectory, we introduce the energy-aware (eware) filter, which iteratively validates the ergodic trajectory to ensure that the robot has enough energy to return to the charging station when needed. The proposed eware filter is applicable to nonlinear robot models and is computationally lightweight. We demonstrate the working of the framework through a simulation case study.
10. Advances in the Theory of Control Barrier Functions: Addressing practical challenges in safe control synthesis for autonomous and robotic systems
Kunal Garg, James Usevitch, Joseph Breeden, Mitchell Black, Devansh Agrawal, Hardik Parwana, Dimitra Panagou
Annual Reviews in Control
2024
pdf /
link /
bib
/
abstract
/
@article{garg2024advances,
title={Advances in the Theory of Control Barrier Functions: Addressing practical challenges in safe control synthesis for autonomous and robotic systems},
author={Garg, Kunal and Usevitch, James and Breeden, Joseph and Black, Mitchell and Agrawal, Devansh and Parwana, Hardik and Panagou, Dimitra},
journal={Annual Reviews in Control},
volume={57},
pages={100945},
year={2024},
publisher={Elsevier}
}This tutorial paper presents recent work of the authors that extends the theory of Control Barrier Functions (CBFs) to address practical challenges in the synthesis of safe controllers for autonomous systems and robots. We present novel CBFs and methods that handle safety constraints (i) with time and input constraints under disturbances, (ii) with high-relative degree under disturbances and input constraints, and (iii) that are affected by adversarial inputs and sampled-data effects. We then present novel CBFs and adaptation methods that prevent loss of validity of the CBF, as well as methods to tune the parameters of the CBF online to reduce conservatism in the system response. We also address the pointwise-only optimal character of CBF-induced control inputs by introducing a CBF formulation that accounts for future trajectories, as well as implementation challenges such as how to preserve safety when using output feedback control and zero-order-hold control. Finally we consider how to synthesize non-smooth CBFs when discontinuous inputs and multiple constraints are present.
11. gatekeeper: Online safety verification and control for nonlinear systems in dynamic environments
Devansh Agrawal, Ruichang Chen, Dimitra Panagou
IEEE IROS 2023
2023
arxiv /
pdf /
video /
code /
link /
bib
/
abstract
/
@inproceedings{agrawal2023gatekeeper,
title={gatekeeper: Online safety verification and control for nonlinear systems in dynamic environments},
author={Agrawal, Devansh and Chen, Ruichang and Panagou, Dimitra},
booktitle={2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={259--266},
year={2023},
organization={IEEE}
}This paper presents the gatekeeper algorithm, a real-time and computationally-lightweight method to ensure that nonlinear systems can operate safely in dynamic environments despite limited perception. gatekeeper integrates with existing path planners and feedback controllers by introducing an additional verification step that ensures that proposed trajectories can be executed safely, despite nonlinear dynamics subject to bounded disturbances, input constraints and partial knowledge of the environment. Our key contribution is that (A) we propose an algorithm to recursively construct committed trajectories, and (B) we prove that tracking the committed trajectory ensures the system is safe for all time into the future. The method is demonstrated on a complicated firefighting mission in a dynamic environment, and compares against the state-of-the-art techniques for similar problems.
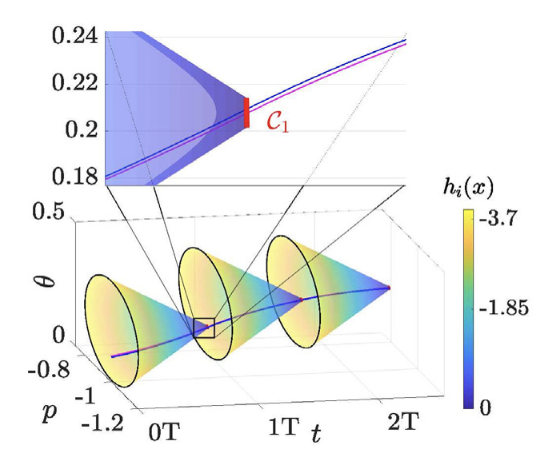
12. Sensor-based Planning and Control for Robotic Systems: Introducing Clarity and Perceivability
⭐️ Best Paper Award, IEEE TC-AC (Technical Committee on Aerospace Controls) 2024 ⭐️
Devansh Agrawal and Dimitra Panagou
IEEE L-CSS and CDC 2023
2023
pdf /
link /
bib
/
abstract
/
@article{agrawal2023sensor,
title={Sensor-based planning and control for robotic systems: Introducing clarity and perceivability},
author={Agrawal, Devansh R and Panagou, Dimitra},
journal={IEEE Control Systems Letters},
year={2023},
publisher={IEEE}
}In this letter, we first introduce an information measure, termed clarity , motivated by information entropy, and show that it has intuitive properties relevant to dynamic coverage control and informative path planning. Clarity defines on a scale of [0,1] the quality of the information that we have about a variable of interest in an environment. Clarity lower bounds the expected estimation error of any estimator, and is used as the information metric in the notion of perceivability , which is defined later on and is the primary contribution of this letter. Perceivability captures whether a given robotic (or more generally, sensing and control) system has sufficient sensing and actuation capabilities to gather desired information about an environment. We show that perceivability relates to the reachability of an augmented system, which encompasses the robot dynamics and the clarity about the environment, and we derive the corresponding Hamilton-Jacobi-Bellman equations. Thus, we provide an algorithm to measure an environment’s perceivability, and obtain optimal controllers that maximize information gain. In simulations, we demonstrate how clarity is a useful concept for planning trajectories, how perceivability can be determined using reachability analysis, and how a Control Barrier Function controller can be used to design controllers to maintain a desired level of information.
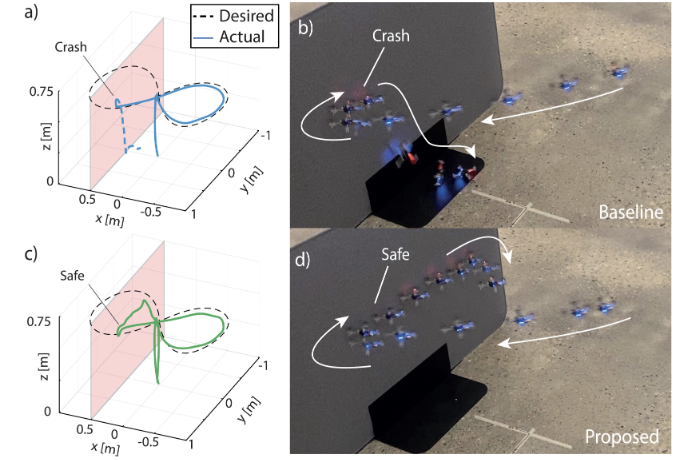
13. Safe and robust observer-controller synthesis using control barrier functions
Devansh Agrawal, Dimitra Panagou
IEEE L-CSS and CDC 2022
2022
pdf /
video /
video 2 /
link /
bib
/
abstract
/
@article{agrawal2022safe,
title={Safe and robust observer-controller synthesis using control barrier functions},
author={Agrawal, Devansh R and Panagou, Dimitra},
journal={IEEE Control Systems Letters},
volume={7},
pages={127--132},
year={2022},
publisher={IEEE}
}This letter addresses the synthesis of safety-critical controllers using estimate feedback. We propose an observer-controller interconnection to ensure that the nonlinear system remains safe despite bounded disturbances on the system dynamics and measurements that correspond to partial state information. The co-design of observers and controllers is critical, since even in undisturbed cases, observers and controllers designed independently may not render the system safe. We propose two approaches to synthesize observer-controller interconnections. The first approach utilizes Input-to-State Stable observers, and the second uses Bounded Error observers. Using these stability and boundedness properties of the observation error, we construct novel Control Barrier Functions that impose inequality constraints on the control inputs which, when satisfied, certifies safety. We propose quadratic program-based controllers to satisfy these constraints, and prove Lipschitz continuity of the derived controllers. Simulations and experiments on a quadrotor demonstrate the efficacy of the proposed methods.
14. A Constructive Method for Designing Safe Multirate Controllers for Differentially-Flat Systems
Devansh Agrawal, Hardik Parwana, Ryan K Cosner, Ugo Rosolia, Aaron D Ames, Dimitra Panagou
IEEE L-CSS and ACC 2022
2021
pdf /
video /
link /
bib
/
abstract
/
@ARTICLE{9655322,
author={Agrawal, Devansh R. and Parwana, Hardik and Cosner, Ryan K. and Rosolia, Ugo and Ames, Aaron D. and Panagou, Dimitra},
journal={IEEE Control Systems Letters},
title={A Constructive Method for Designing Safe Multirate Controllers for Differentially-Flat Systems},
year={2022},
volume={6},
number={},
pages={2138-2143},
doi={10.1109/LCSYS.2021.3136465}
}This paper introduces the notion of an Input Constrained Control Barrier Function (ICCBF), as a method to synthesize safety-critical controllers for nonlinear control-affine systems with input constraints. The method identifies a subset of the safe set of states, and constructs a controller to render the subset forward invariant. The feedback controller is represented as the solution to a quadratic program, which can be solved efficiently for real-time implementation. Furthermore, we show that ICCBFs are a generalization of Higher Order Control Barrier Functions, and thus are applicable to systems of non- uniform relative degree. Simulation results are presented for the adaptive cruise control problem, and a spacecraft rendezvous problem.
15. Safe Control Synthesis via Input Constrained Control Barrier Functions
Devansh Agrawal and Dimitra Panagou
IEEE CDC 2021
2021
pdf /
video /
link /
bib
/
abstract
/
@INPROCEEDINGS{9682938,
author={Agrawal, Devansh R. and Panagou, Dimitra},
booktitle={2021 60th IEEE Conference on Decision and Control (CDC)},
title={Safe Control Synthesis via Input Constrained Control Barrier Functions},
year={2021},
volume={},
number={},
pages={6113-6118},
doi={10.1109/CDC45484.2021.9682938}
}This paper introduces the notion of an Input Constrained Control Barrier Function (ICCBF), as a method to synthesize safety-critical controllers for nonlinear control-affine systems with input constraints. The method identifies a subset of the safe set of states, and constructs a controller to render the subset forward invariant. The feedback controller is represented as the solution to a quadratic program, which can be solved efficiently for real-time implementation. Furthermore, we show that ICCBFs are a generalization of Higher Order Control Barrier Functions, and thus are applicable to systems of non- uniform relative degree. Simulation results are presented for the adaptive cruise control problem, and a spacecraft rendezvous problem.
16. Mind The Gap: Real-time Decentralized Distance Estimation using Ultrasound and Bluetooth across Multiple Smartphones
Devansh Agrawal, Peter Lyon, Martin Frobisher, Andy Doherty, Ben Allen, Freddie Rawlins
ArXiv
2020
pdf /
link /
bib
/
abstract
/
@article{agrawal2020mind,
title={Mind The Gap: Real-time Decentralized Distance Estimation using Ultrasound and Bluetooth across Multiple Smartphones},
author={Agrawal, Devansh R and Lyon, Peter and Frobisher, Martin and Doherty, Andy and Allen, Ben and Rawlins, Freddie},
journal={arXiv preprint arXiv:2008.13564},
year={2020}
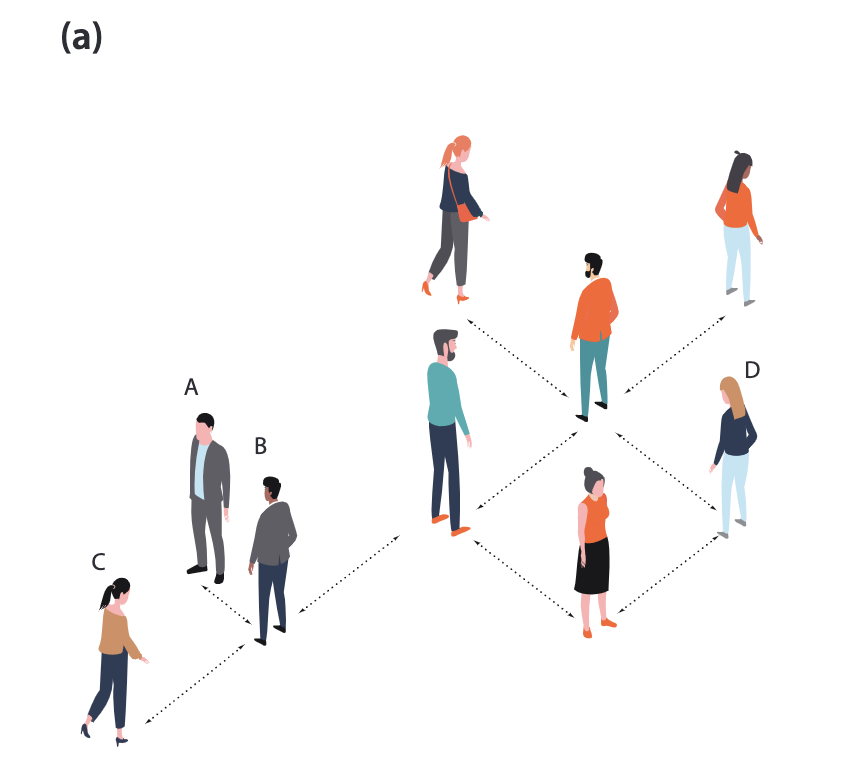
}Robust, low-cost solutions are needed to maintain social distancing guidelines during the COVID-19 pandemic. We establish a method to measure the distance between multiple phones across a large number of closely spaced smartphones with a median absolute error of 8.5 cm. The application works in real-time, using Time of Flight of near-ultrasound signals, providing alerts with sufficient responsiveness to be useful for distancing while devices are in users pockets and they are moving at walking speed. The approach is decentralized, requires no additional hardware, and can operate in the background without an internet connection. We have no device specific requirements nor need any manual calibration or device synchronization. It has been tested with over 20 different phones models, from both the Android and iOS systems in the past 5 years. To the best of our knowledge, this is the first successful such implementation, and has 25000 users at time of publishing.
17. Higher thrust-to-power with large electrode gap spacing electroaerodynamic devices for aircraft propulsion
Haofeng Xu, Nicolas Gomez-Vega, Devansh Agrawal and Steven R H Barrett
Journal of Physics D: Applied Physics
2019
pdf /
link /
bib
/
abstract
/
@article{Xu_2019,
doi = {10.1088/1361-6463/ab4a4c},
url = {https://doi.org/10.1088/1361-6463/ab4a4c},
year = 2019,
month = {oct},
publisher = {{IOP} Publishing},
volume = {53},
number = {2},
pages = {025202},
author = {Haofeng Xu and Nicolas Gomez-Vega and Devansh R Agrawal and Steven R H Barrett},
title = {Higher thrust-to-power with large electrode gap spacing electroaerodynamic devices for aircraft propulsion},
journal = {Journal of Physics D: Applied Physics},
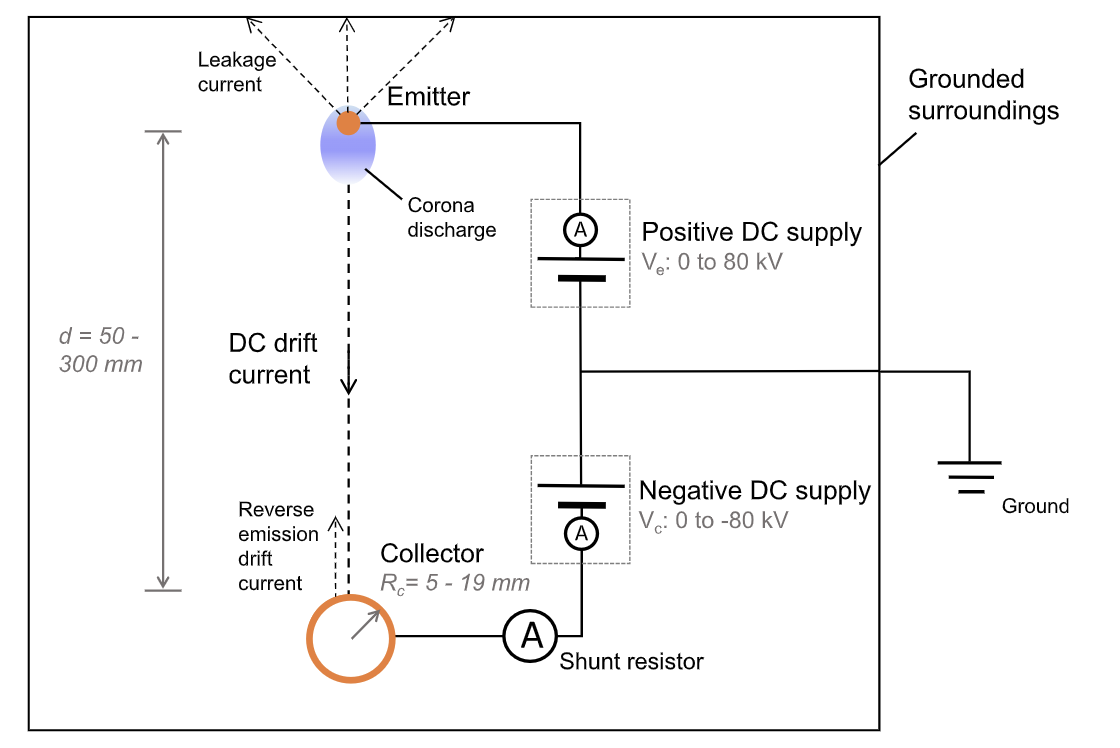
}Electroaerodynamic (EAD) devices, which produce a propulsive force in air by electrostatic acceleration, have been demonstrated as a method of propulsion for airplanes. However, achieving sufficient thrust-to-power is a significant challenge in developing EAD aircraft which are practical. Theory predicts that devices with larger inter-electrode gap spacing will enable higher thrust-to-power, but most experimental work has been limited to gap spacings of less than 80 mm. Those studies which have investigated spacings of greater than 100 mm have found results deviating from theory, with lower thrust-to-power than predicted. We performed experiments between 50 and 300 mm gap spacing and conclude that three effects explain the discrepancy: ‘leakage current’ from the electrodes to the surroundings, which does not produce thrust but increases measured electrical power; reverse corona emission from the collecting electrode, which reduces thrust and increases power; and the electric potential of the thruster relative to its surroundings, which affects both leakage current and reverse corona emission. Our results show that if these effects are accounted for, the existing EAD theory is correct without modification beyond its previous range of validity and is applicable to wire-to-cylinder EAD devices up to at least 300 mm gap spacing. We support our experimental results with two-dimensional numerical simulations, which show that the experimental current and thrust, including effects of leakage current, can be reproduced by computation with 12% error—an important step towards numerical design and optimization. By experimentally replicating equilibrium in-flight conditions, we measure thrust-to-power in the laboratory of up to 15 N kW−1 for large gap spacing thrusters at practically useful thrust levels. This is two to three times higher than current implementations with smaller gap spacings, suggesting that large gap spacing thrusters will be suitable for future EAD-propelled flight applications at thrust-to-power competitive with or exceeding conventional propulsion.
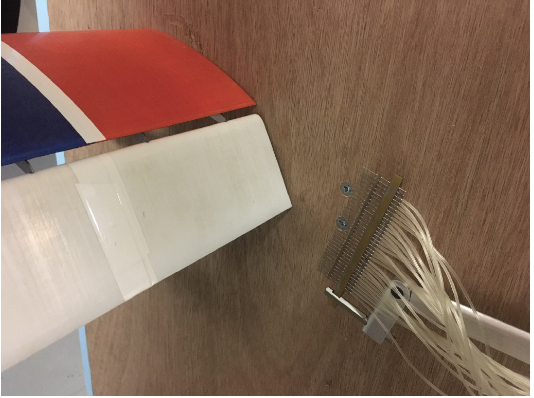
18. Wind Tunnel Testing of a Blown Flap Wing
Devansh Agrawal, Faisal Asad, Blake M. Berk, Trevor Long, Jackson Lubin, Christopher Courtin, Mark Drela, R John Hansman and Jacqueline L. Thomas
AIAA Aviation Forum 2019
2019
pdf /
link /
bib
/
abstract
/
@inbook{doi:10.2514/6.2019-3170,
author = {Devansh Agrawal and Faisal Asad and Blake M. Berk and Trevor Long and Jackson Lubin and Christopher Courtin and Mark Drela and R John Hansman and Jacqueline L. Thomas},
title = {Wind Tunnel Testing of a Blown Flap Wing},
booktitle = {AIAA Aviation 2019 Forum},
chapter = {},
pages = {},
doi = {10.2514/6.2019-3170},
URL = {https://arc.aiaa.org/doi/abs/10.2514/6.2019-3170},
eprint = {https://arc.aiaa.org/doi/pdf/10.2514/6.2019-3170}
}This paper presents wind tunnel measurements of blown flapped airfoil performance forapplication to distributed electric propulsion STOL aircraft. The 2D airfoil wind tunnelmodel features a simple slotted flap, and closely-spaced spanwise-distributed propellers drivenby electric motors. Measurements of lift, pitching moment and net streamwise force (dragminus thrust) were made over a range of propeller RPM, angle of attack and flap angle. Liftcoefficients up to 9 were measured for practical blowing levels. High lift was also measuredwith net streamwise force close to zero, which suggests that the use of blown lift during landingis practical.
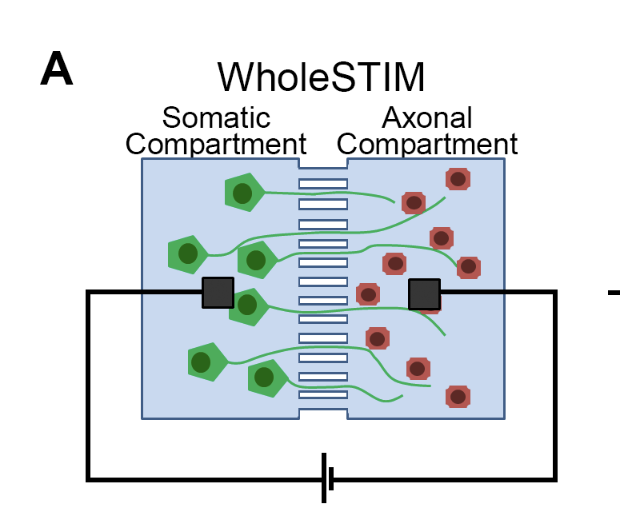
19. Subcellular electrical stimulation of neurons enhances the myelination of axons by oligodendrocytes
Hae Ung Lee, Agata Blasiak, Devansh Agrawal, Daniel Teh Boon Loong, Nitish V. Thakor, Angelo H. All, John S. Ho, In Hong Yang
PLOS One
2017
pdf /
link /
bib
/
abstract
/
@article{10.1371/journal.pone.0179642,
author = {Lee, Hae Ung AND Blasiak, Agata AND Agrawal, Devansh R. AND Loong, Daniel Teh Boon AND Thakor, Nitish V. AND All, Angelo H. AND Ho, John S. AND Yang, In Hong},
journal = {PLOS ONE},
publisher = {Public Library of Science},
title = {Subcellular electrical stimulation of neurons enhances the myelination of axons by oligodendrocytes},
year = {2017},
month = {07},
volume = {12},
url = {https://doi.org/10.1371/journal.pone.0179642},
pages = {1-17},
number = {7},
doi = {10.1371/journal.pone.0179642}
}Myelin formation has been identified as a modulator of neural plasticity. New tools are required to investigate the mechanisms by which environmental inputs and neural activity regulate myelination patterns. In this study, we demonstrate a microfluidic compartmentalized culture system with integrated electrical stimulation capabilities that can induce neural activity by whole cell and focal stimulation. A set of electric field simulations was performed to confirm spatial restriction of the electrical input in the compartmentalized culture system. We further demonstrate that electrode localization is a key consideration for generating uniform the stimulation of neuron and oligodendrocytes within the compartments. Using three configurations of the electrodes we tested the effects of subcellular activation of neural activity on distal axon myelination with oligodendrocytes. We further investigated if oligodendrocytes have to be exposed to the electrical field to induce axon myelination. An isolated stimulation of cell bodies and proximal axons had the same effect as an isolated stimulation of distal axons co-cultured with oligodendrocytes, and the two modes had a non-different result than whole cell stimulation. Our platform enabled the demonstration that electrical stimulation enhances oligodendrocyte maturation and myelin formation independent of the input localization and oligodendrocyte exposure to the electrical field.
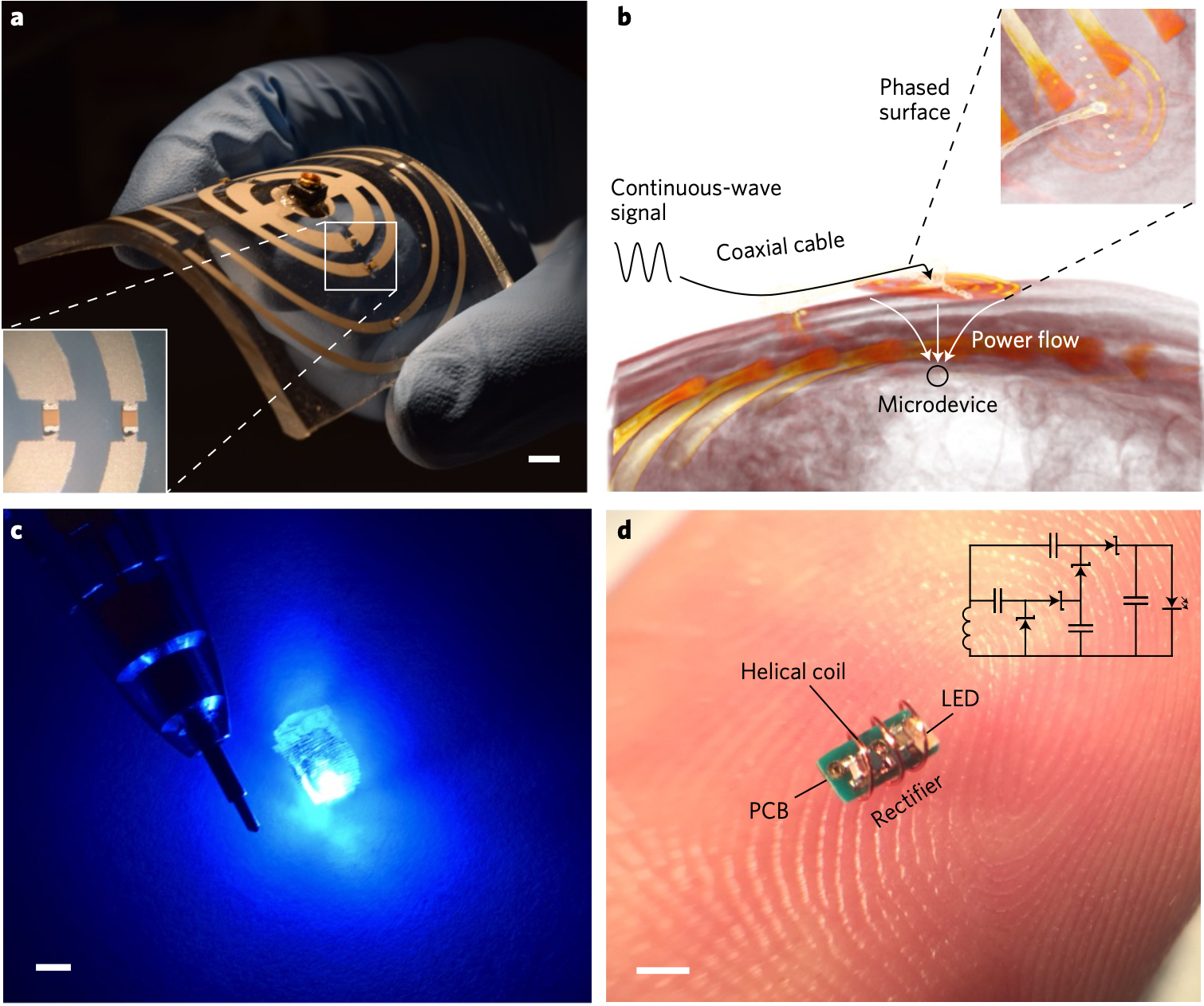
20. Conformal phased surfaces for wireless powering of bioelectronic microdevices
Devansh Agrawal, Yuji Tanabe, Desen Weng, Andrew Ma, Stephanie Hsu, Song-Yan Liao, Zhe Zhen, Zi-Yi Zhu, Chuanbowen Sun, Zhenya Dong, Fengyuan Yang, Hung Fat Tse, Ada S. Y. Poon, John S. Ho
Nature Biomed. Eng.
2017
pdf /
link /
bib
/
abstract
/
@article{Agrawal2017,
author = {Agrawal, Devansh R. and Tanabe, Yuji and Weng, Desen and Ma, Andrew and Hsu, Stephanie and Liao, Song Yan and Zhen, Zhe and Zhu, Zi Yi and Sun, Chuanbowen and Dong, Zhenya and Yang, Fengyuan and Tse, Hung Fat and Poon, Ada S.Y. and Ho, John S.},
doi = {10.1038/s41551-017-0043},
issn = {2157846X},
journal = {Nature Biomedical Engineering},
number = {3},
pages = {1--9},
publisher = {Macmillan Publishers Limited, part of Springer Nature.},
title = {{Conformal phased surfaces for wireless powering of bioelectronic microdevices}},
url = {http://dx.doi.org/10.1038/s41551-017-0043},
volume = {1},
year = {2017}
}Wireless powering could enable the long-term operation of advanced bioelectronic devices within the human body. Although both enhanced powering depth and device miniaturization can be achieved by shaping the field pattern within the body, existing electromagnetic structures do not provide the spatial phase control required to synthesize such patterns. Here, we describe the design and operation of conformal electromagnetic structures, termed phased surfaces, that interface with non-planar body surfaces and optimally modulate the phase response to enhance the performance of wireless powering. We demonstrate that the phased surfaces can wirelessly transfer energy across anatomically heterogeneous tissues in large animal models, powering miniaturized semiconductor devices (<12 mm3) deep within the body (>4 cm). As an illustration of in vivo operation, we wirelessly regulated cardiac rhythm by powering miniaturized stimulators at multiple endocardial sites in a porcine animal model.
Patents
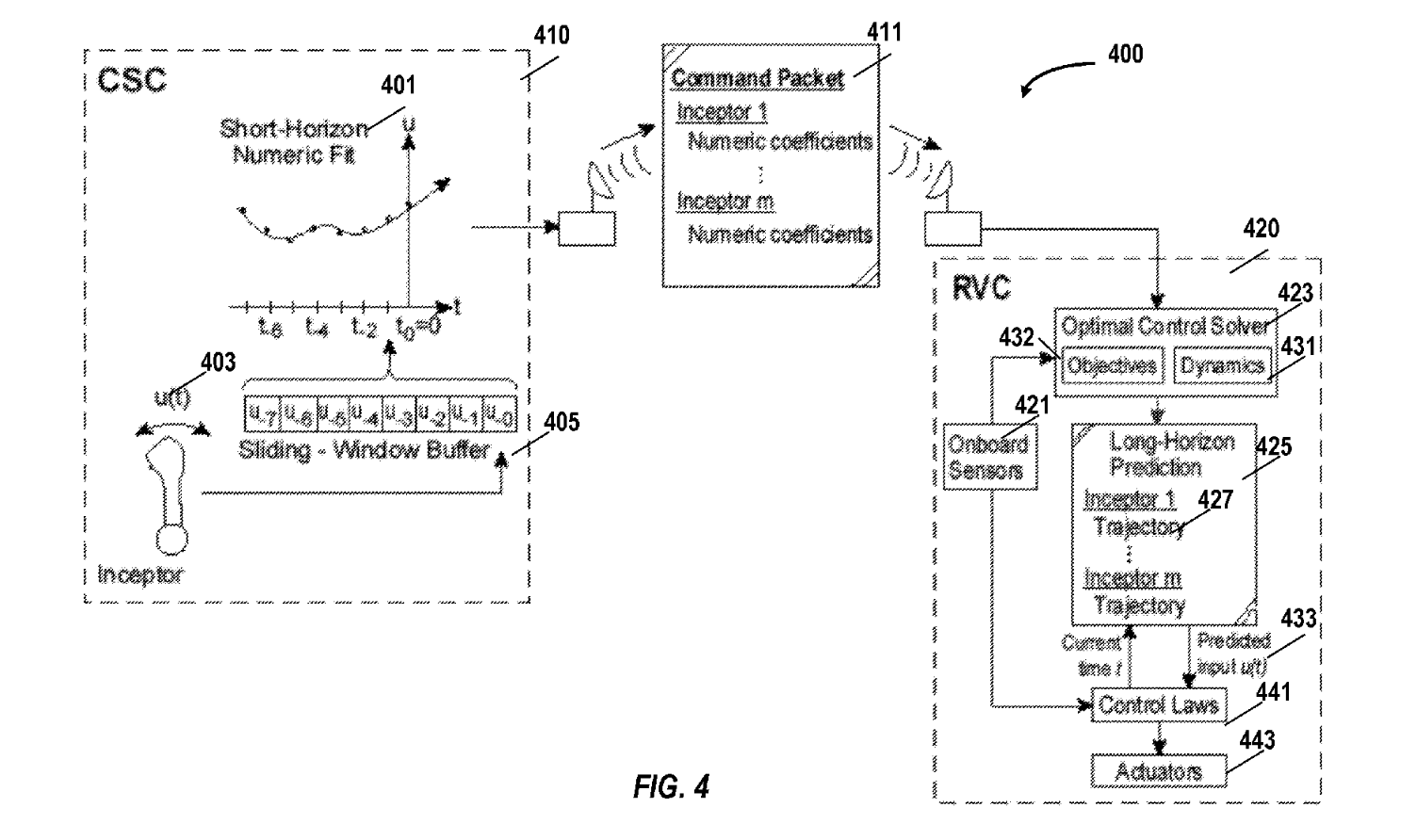
Methods and Systems for Remote Operation of Vehicles
(patent pending) The present invention provides methods and systems for remote operation of a vehicle with the capability to deal with communications jitter and intermittency. In particular, the methods and systems herein may safely predict a remote operator's intent (e.g., remote pilot) over long time scales, and up to the lost link timeout TLL.
More Info >>
Design and source code modified from Jon Barron's website. Edit here.